Projects
Research and development projects across computational neuroscience, connectomics, and embodied robotics.
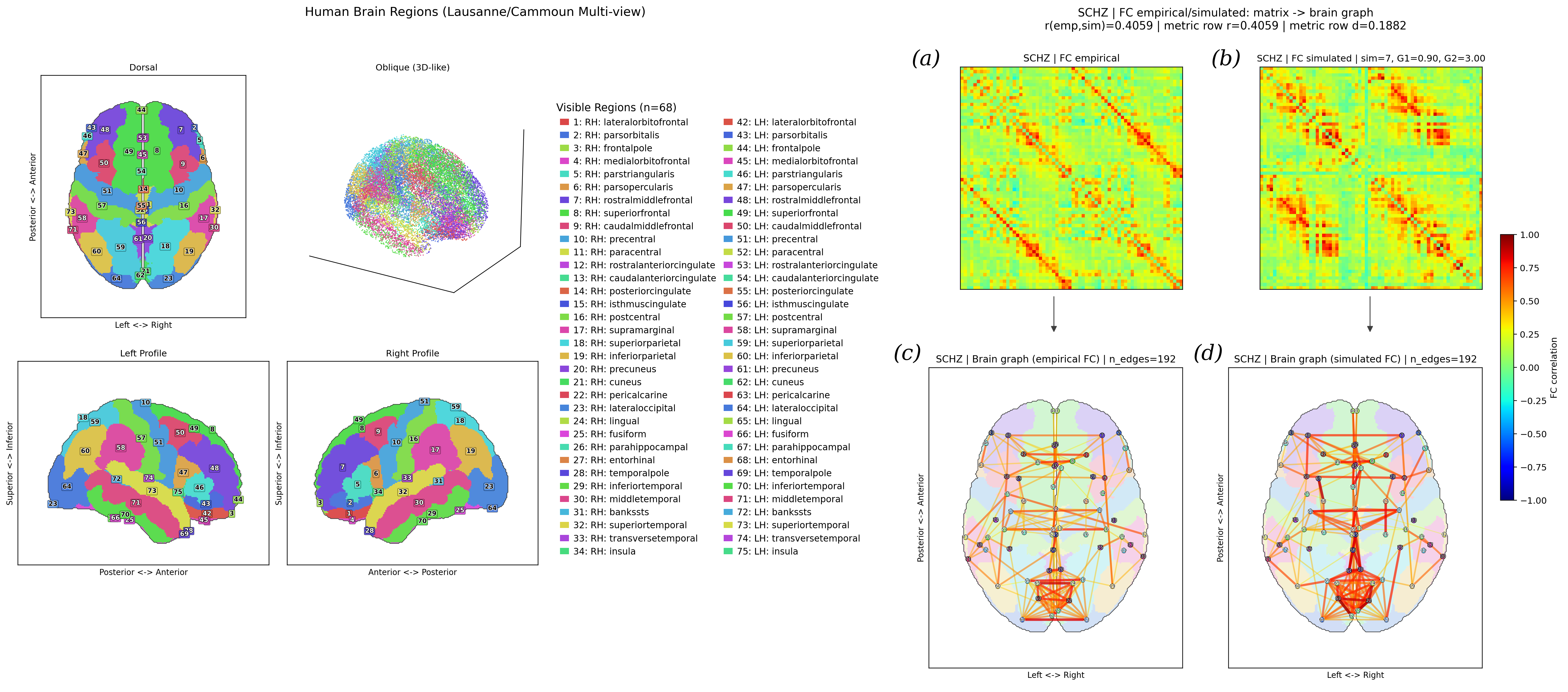
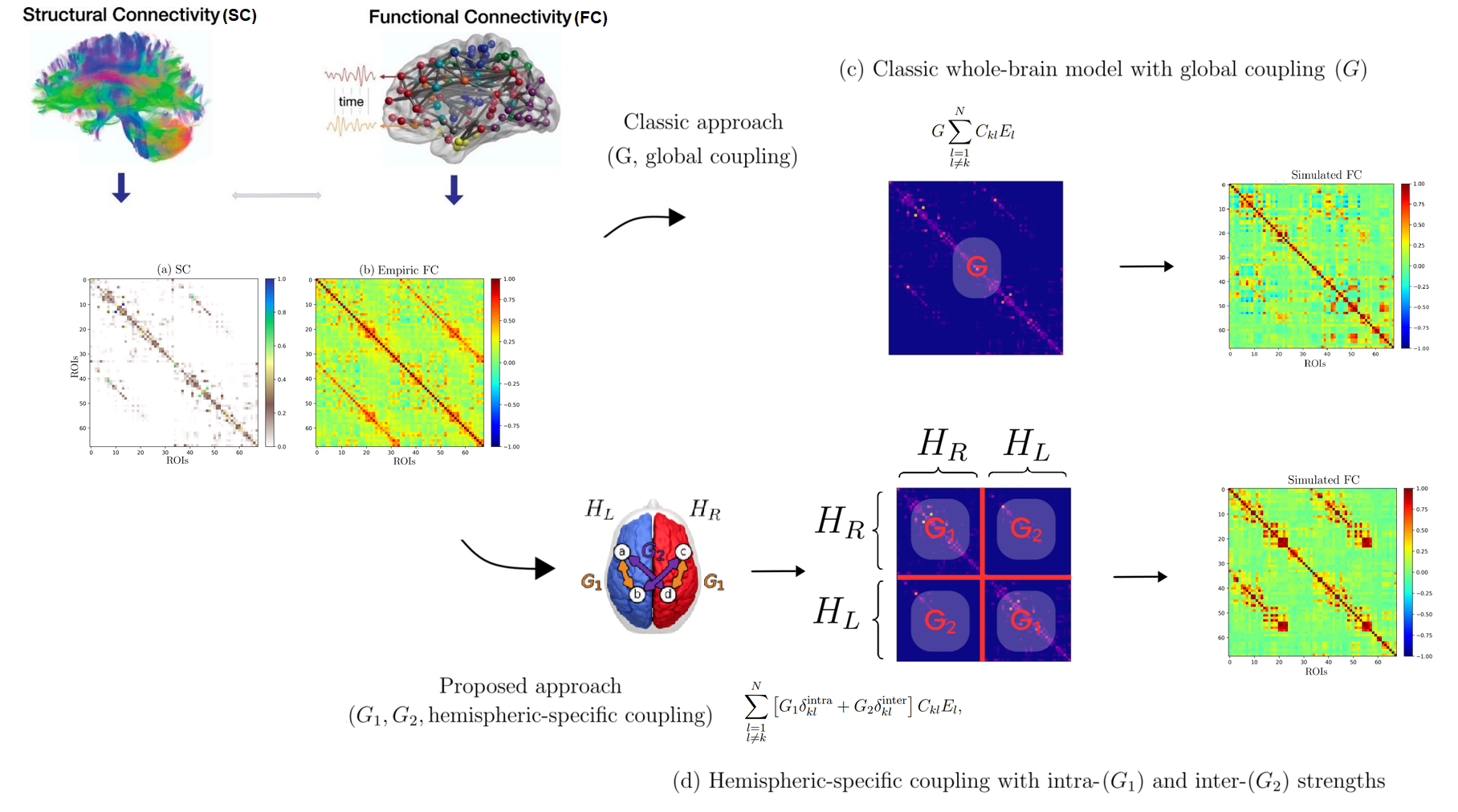
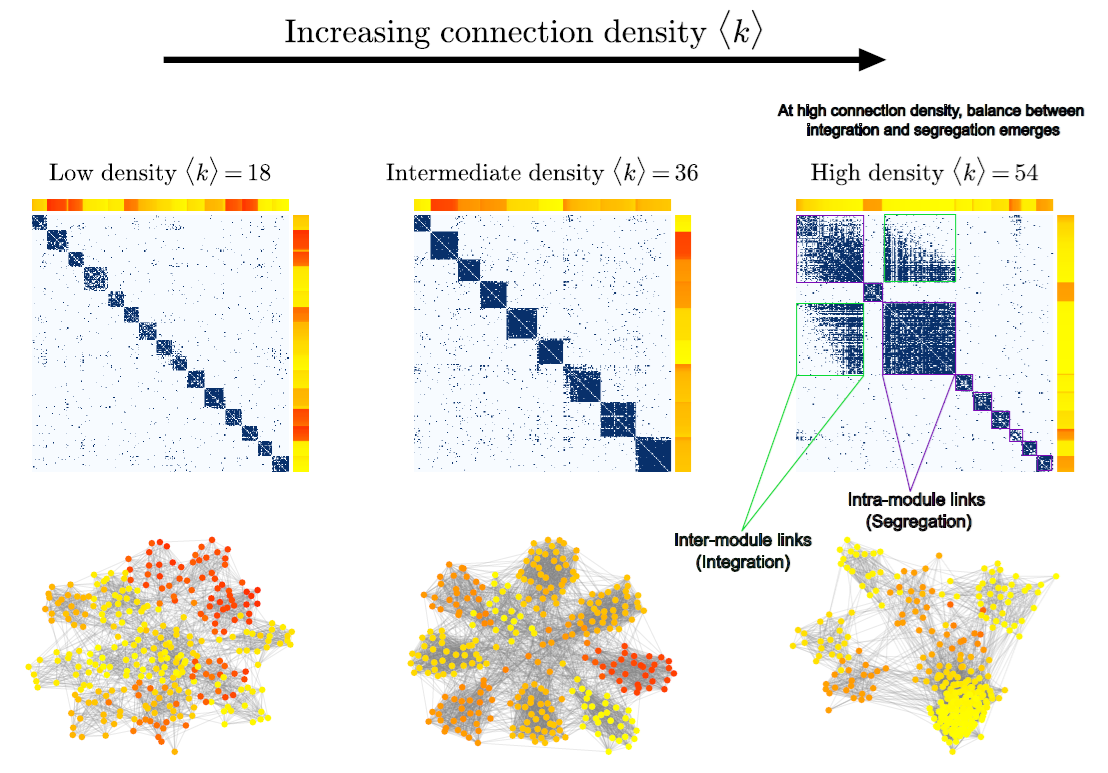
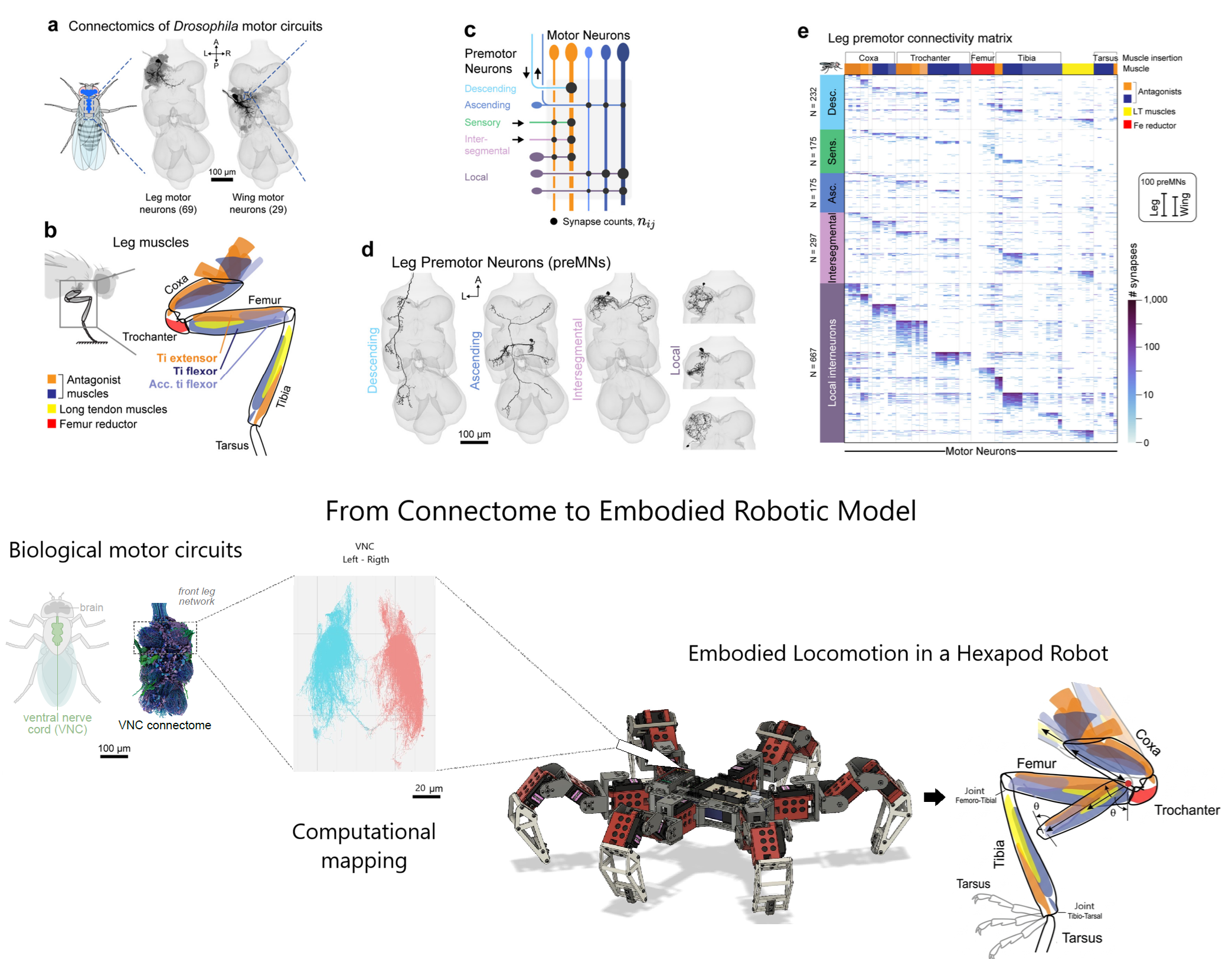
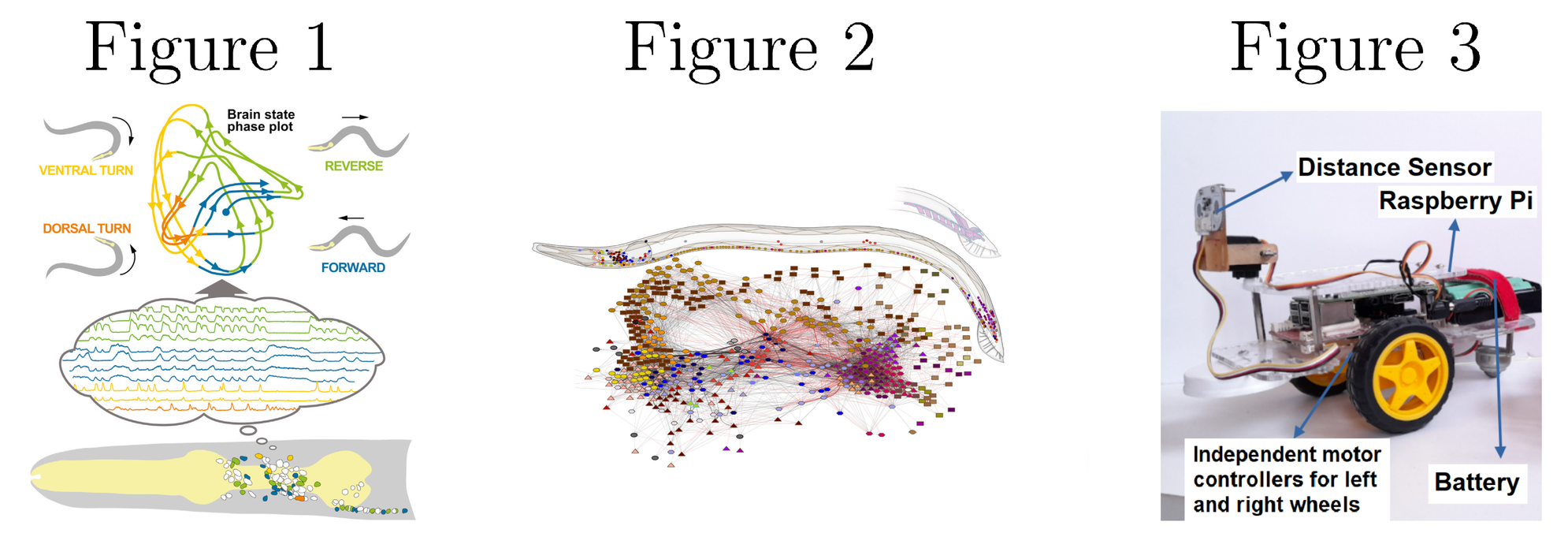
Research & Reference Figures
Robotics Prototypes & Evolution
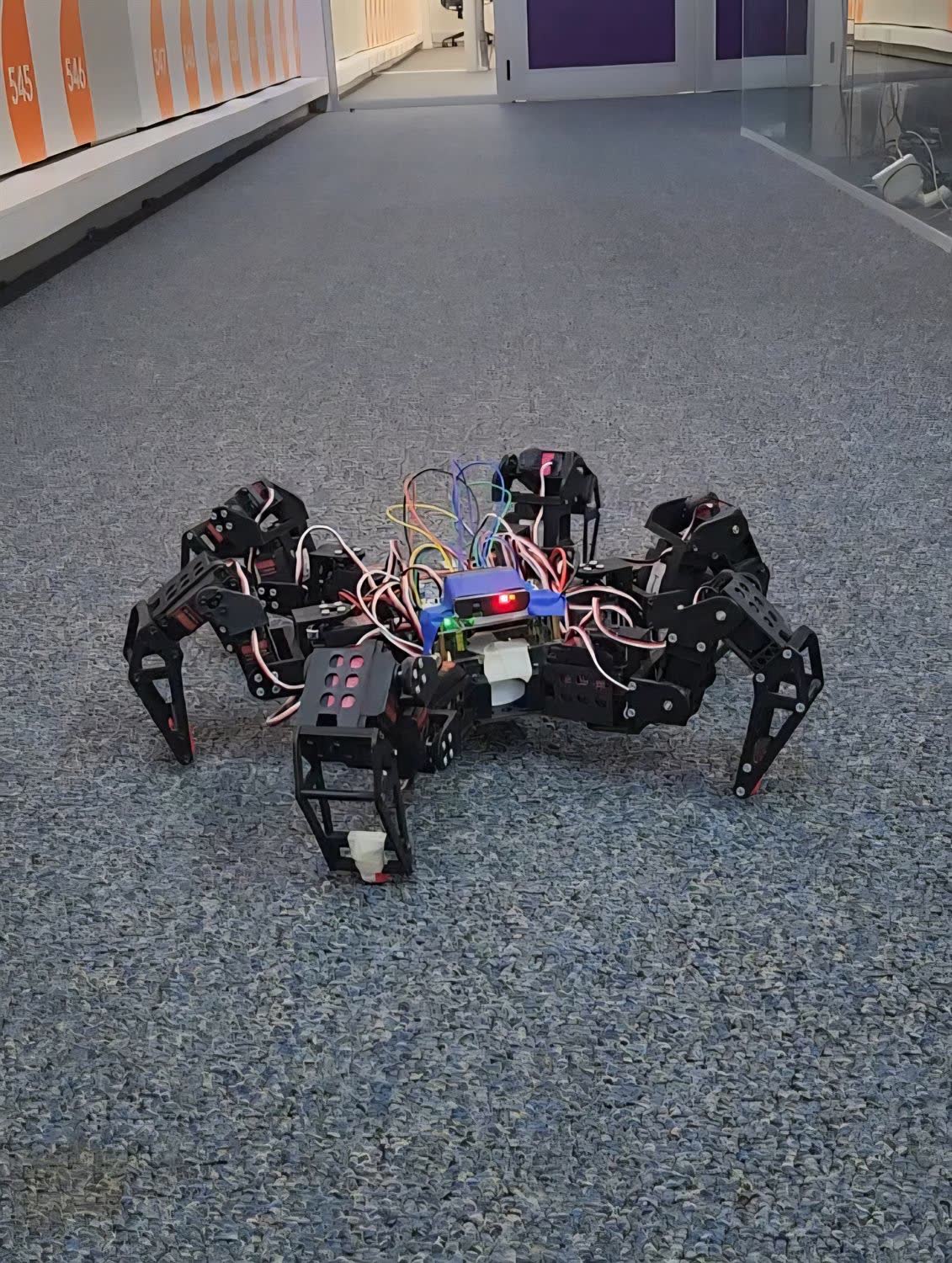





Mecanum Robotic Model
Omni-directional mobile platform with joystick control and obstacle-aware sensing.
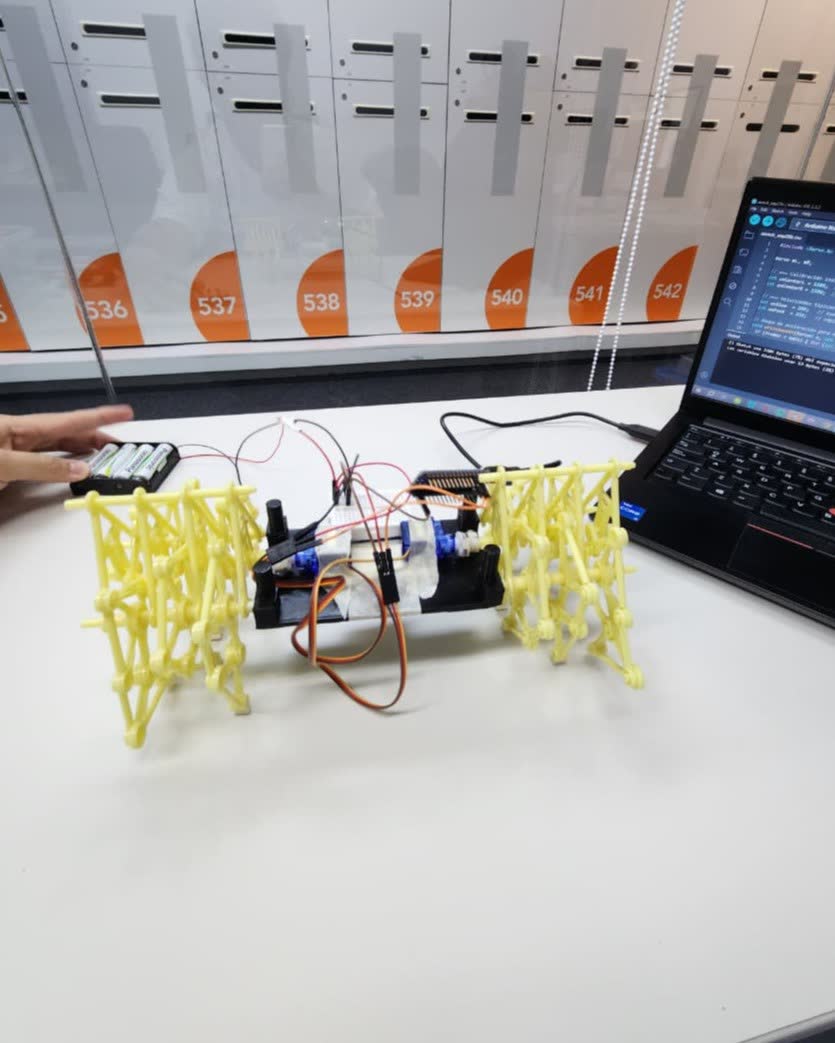
Theo Jansen's Robot Model
Linkage-based walking prototype inspired by Theo Jansen mechanisms.