Connectome-Driven Embodied Robotics
Building robotic control architectures from biological connectomes to study autonomy, proprioception, and sensorimotor feedback.
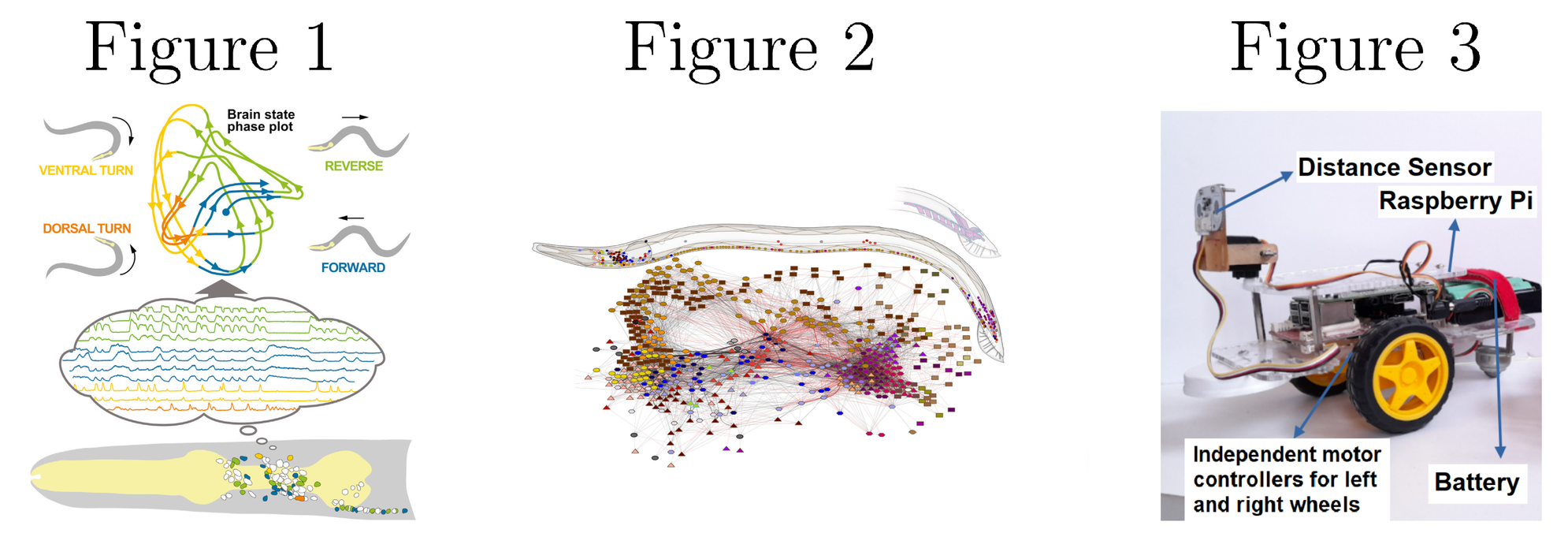
Figure captions:
- Figure 1: Low-dimensional neural manifold capturing global brain dynamics underlying forward, reverse, and turning behavior in C. elegans [Kato et al. (2015)].
- Figure 2: Full adult male C. elegans connectome [Cook et al. (2019)].
- Figure 3: Neurorobotic implementation of the C. elegans connectome on a differential-drive robot platform [Valencia Urbina et al. (2023)].
This line of research builds on previous neurorobotic work developed in our group using biological connectomes as control architectures. Inspired by earlier implementations based on C. elegans, my current interest is to extend this framework toward Drosophila connectomics and embodied control in a hexapod robotic platform. The broader hypothesis is that connectome-based architectures can function as biologically pre-trained networks, reducing reliance on conventional artificial training while preserving rich sensorimotor dynamics. My current focus is on embodiment, closed-loop feedback, robustness under perturbations, and the transfer of structure-function principles from neuroscience to robotics. The composite figure shown here is centered on C. elegans-based references that motivate this research direction.
Links:
- Valencia Urbina et al. (2023), neurorobotic implementation of the C. elegans connectome: https://doi.org/10.3389/fnbot.2022.1041410
- Cook et al. (2019), full adult C. elegans connectome: https://doi.org/10.1038/s41586-019-1352-7
- Kato et al. (2015), low-dimensional brain dynamics in C. elegans: https://doi.org/10.1016/j.cell.2015.09.034