From Circuits to Embodied Robotics
Biological motor circuits, computational mapping, and embodied hexapod robotics.
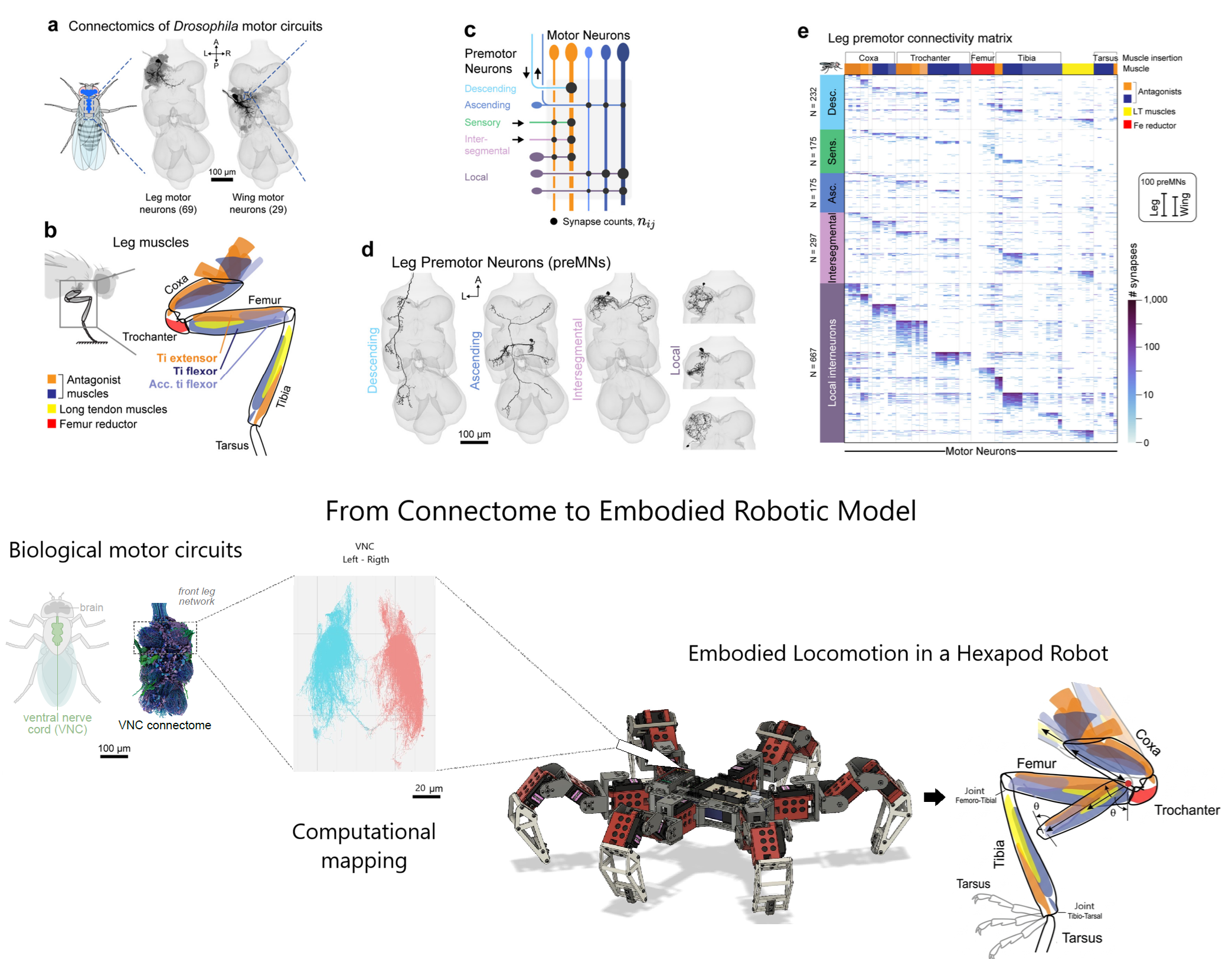
Figure captions:
- From Drosophila leg motor circuit organization to computational mapping and embodied hexapod robotics. Biological circuit panels [Lesser et al. (2025)]. Robotic platform based on the open CAD and code [Markwtech (2019)].
Recent connectomic reconstructions of the Drosophila central nervous system and motor circuits open the possibility of extending neurorobotic strategies previously explored in our group using biological connectomes as control architectures. Building on earlier C. elegans work developed in our lab [Valencia Urbina et al. (2023)], my current research direction is to leverage newly resolved Drosophila premotor-motor pathways to design embodied control systems, with a particular focus on hexapod robotics. The broader goal is to test whether biologically grounded circuit architectures can support sensorimotor control, closed-loop feedback, and robust behavior without relying exclusively on conventional artificial training.
Links:
- Lesser et al. (2025), leg and wing premotor control networks in Drosophila: https://doi.org/10.1038/s41586-024-07600-z
- Valencia Urbina et al. (2023), neurorobotic implementation of biological connectomes as control architectures: https://doi.org/10.3389/fnbot.2022.1041410
- Markwtech (2019), open CAD + code (Hexapod Robot): https://www.instructables.com/Hexapod-Robot/