Hexapod Robotic Model | Joystick control - Natural motions
Latest iteration of the Hexapod Robotic Model with joystick control and natural motion primitives.
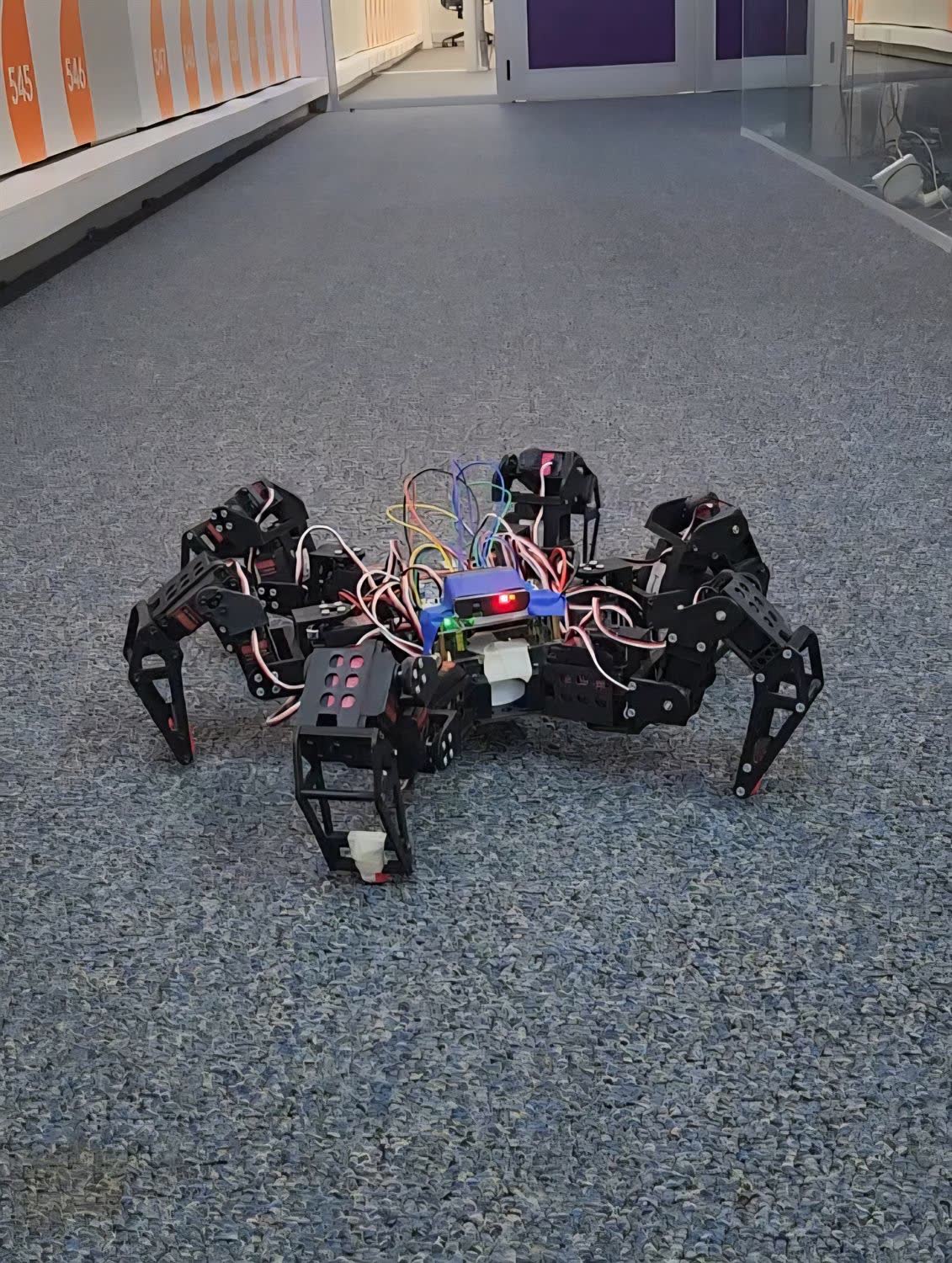
Hexapod locomotion controlled via joystick, combining continuous manual control with motion primitives for natural behavior.